GraspMan
My Work | | Links:
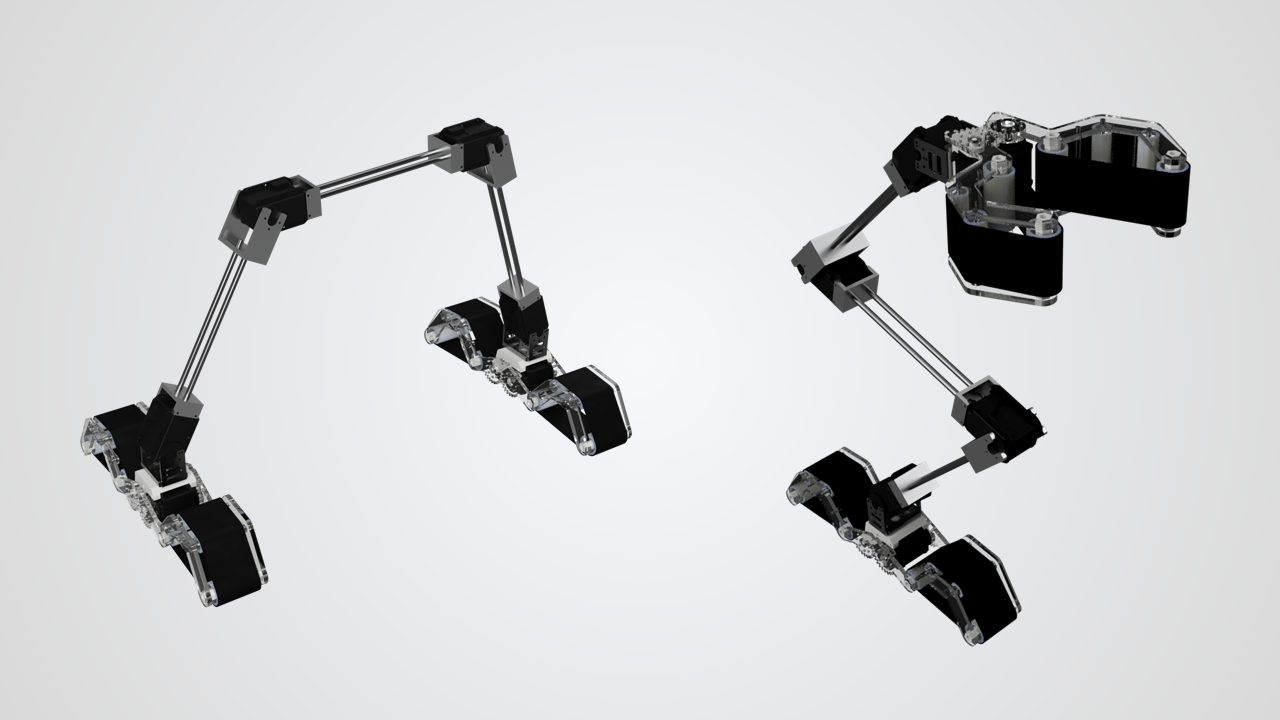
The motive of this project was to construct a robot capable of multiple actions by leveraging redundant serial chains.
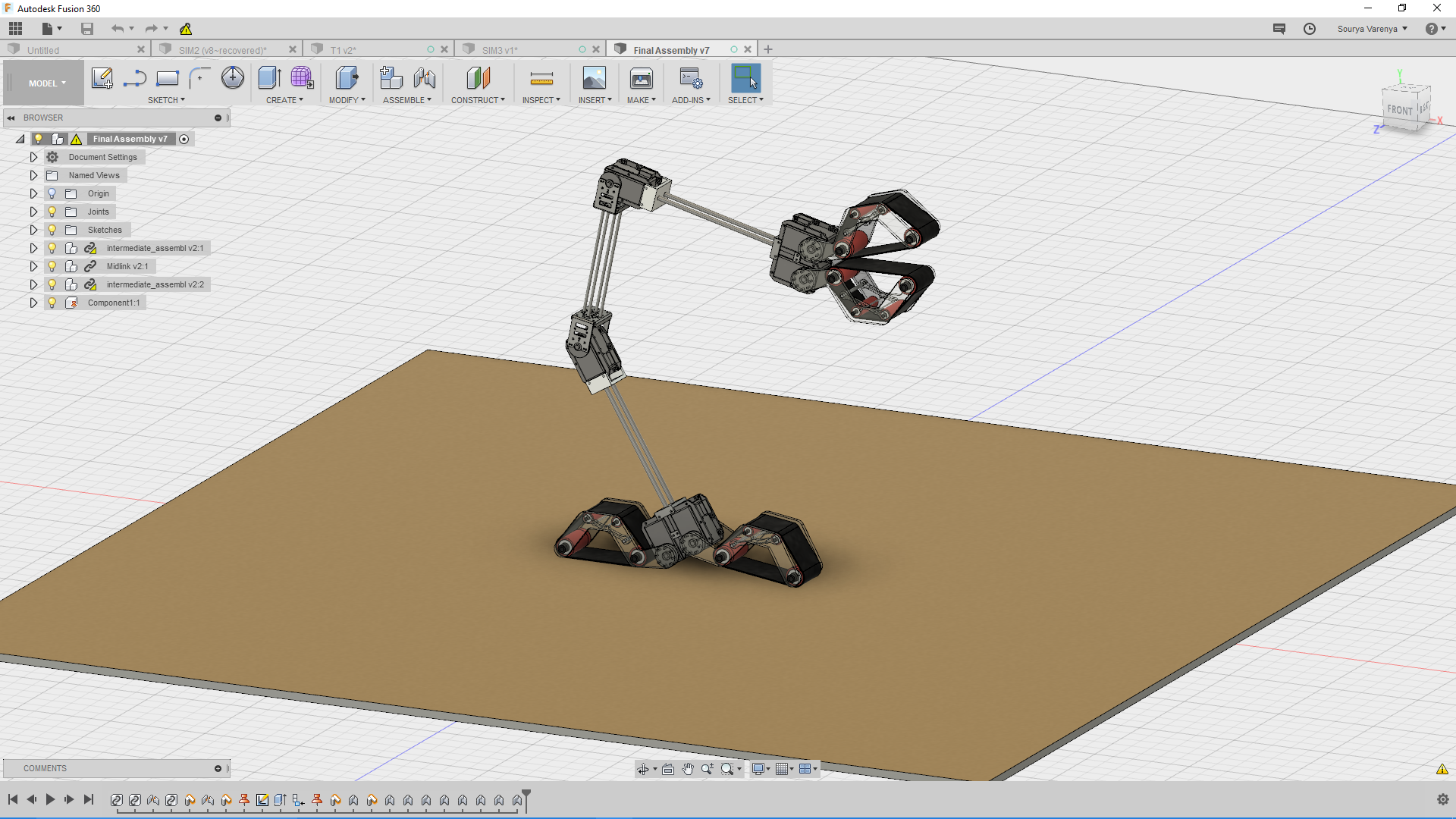
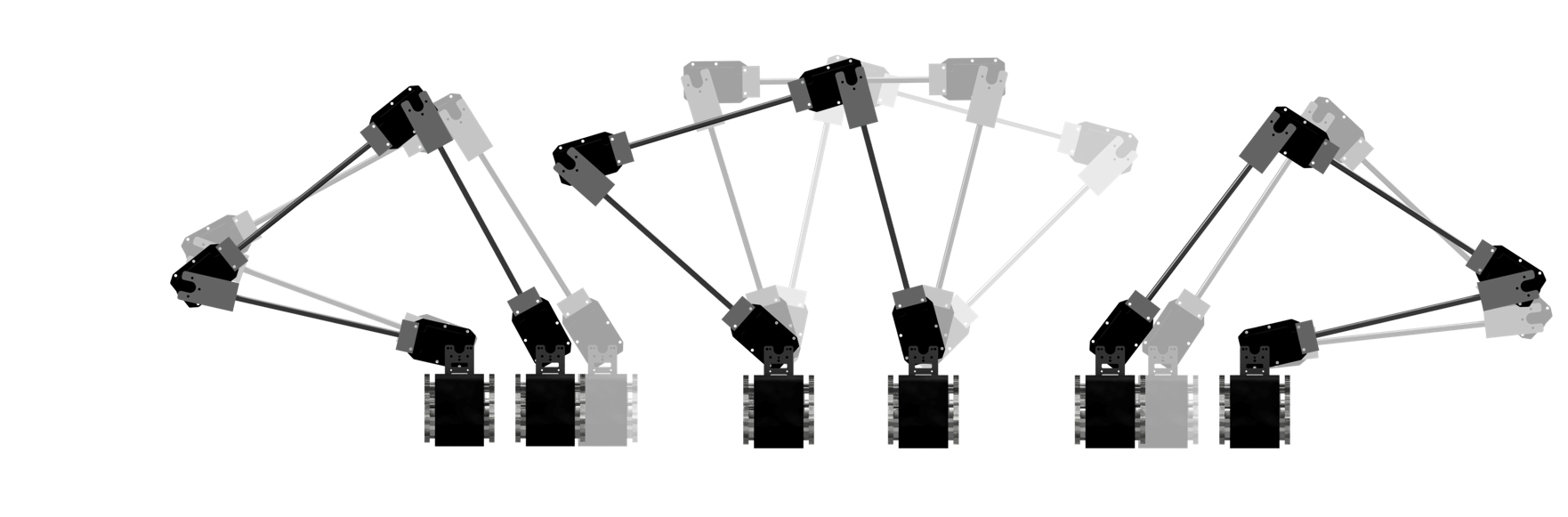
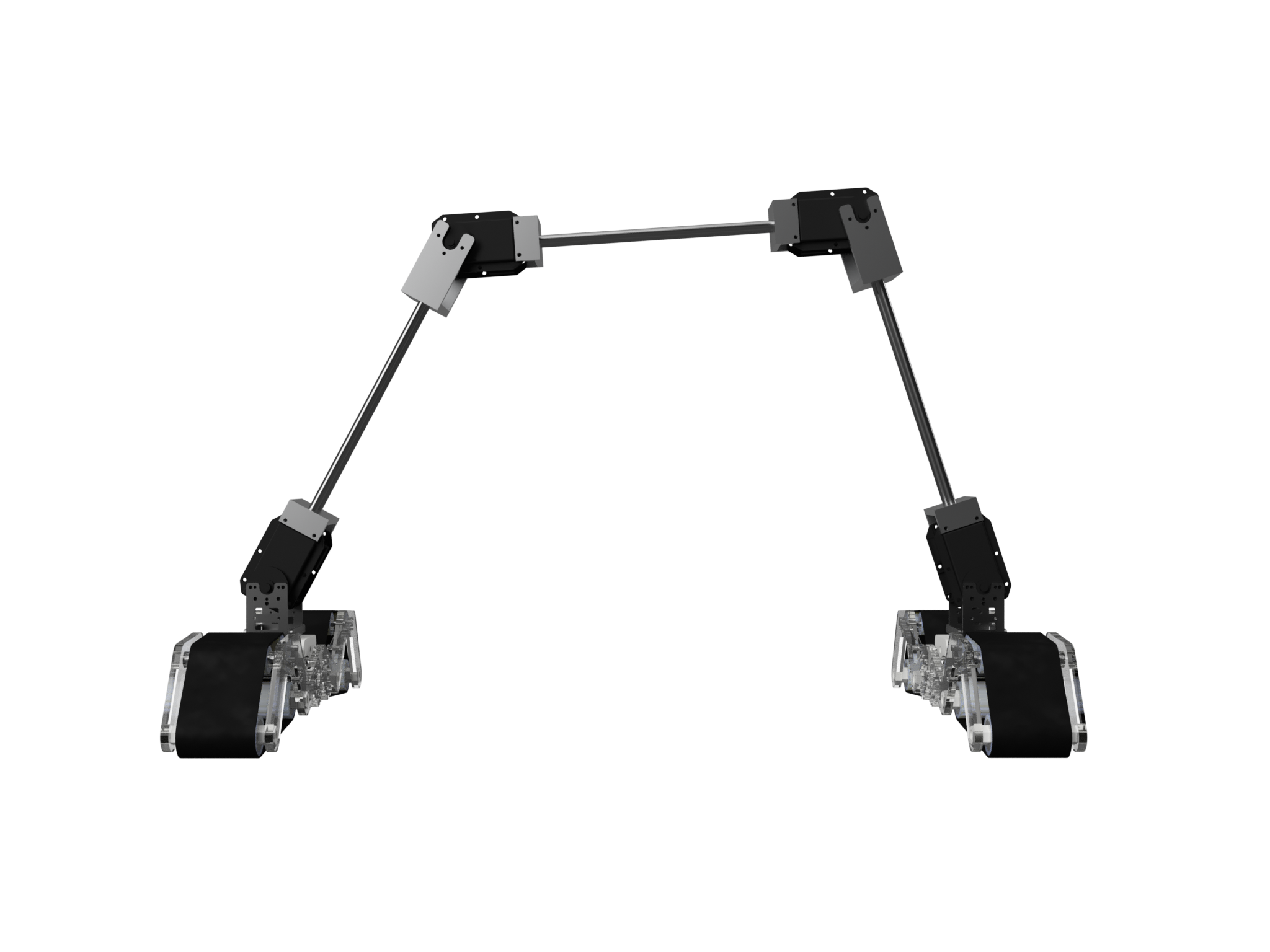
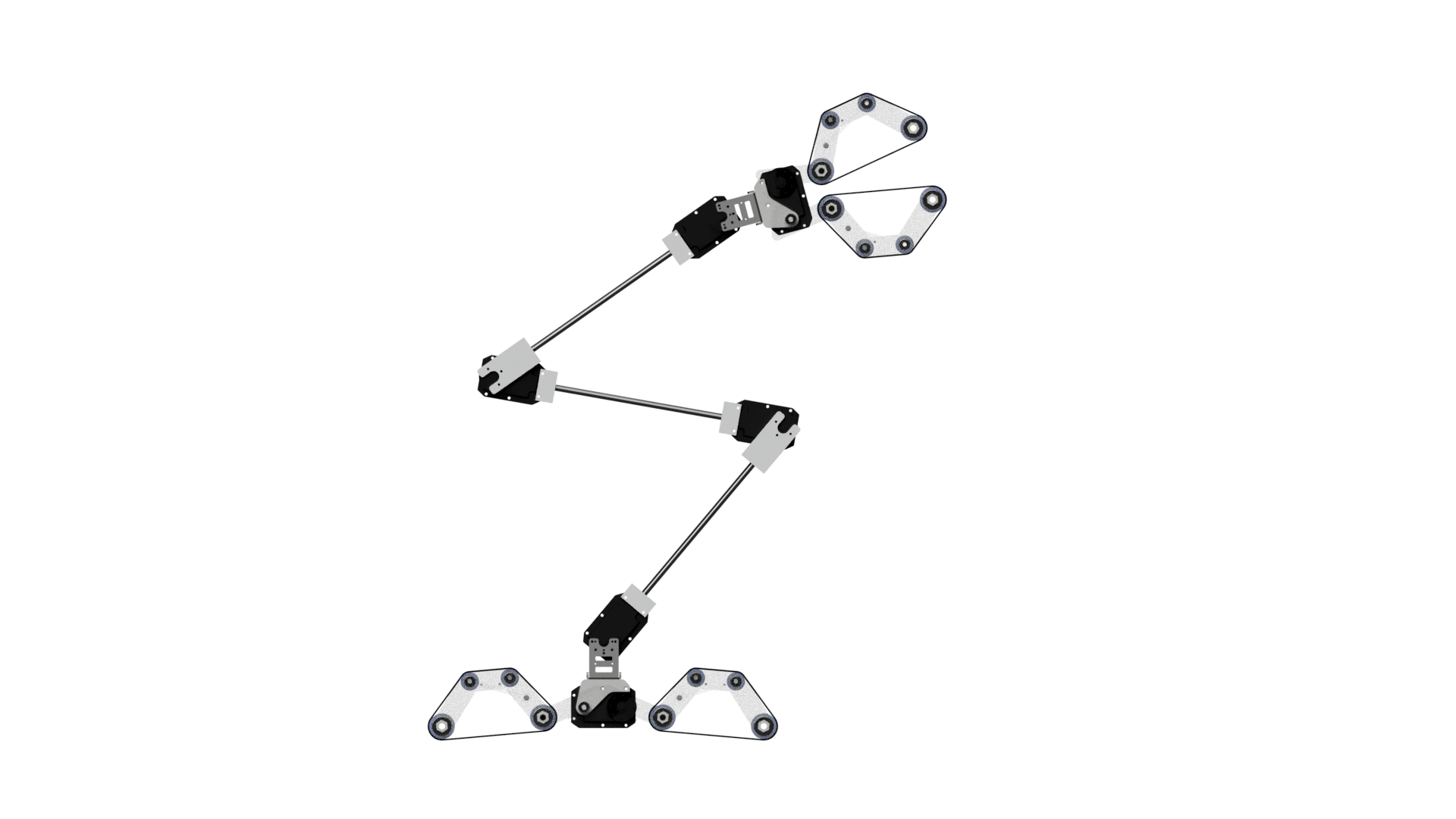
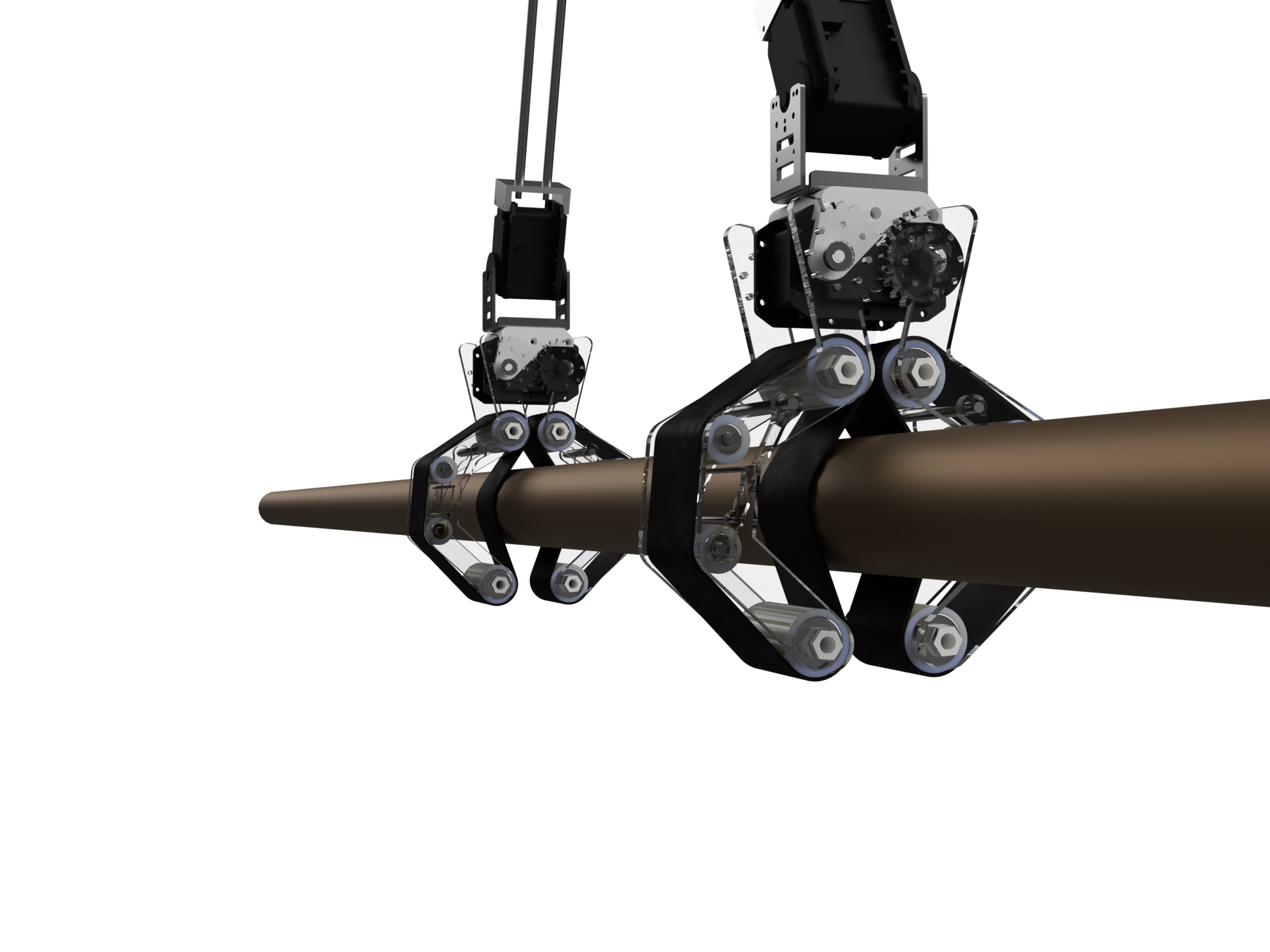
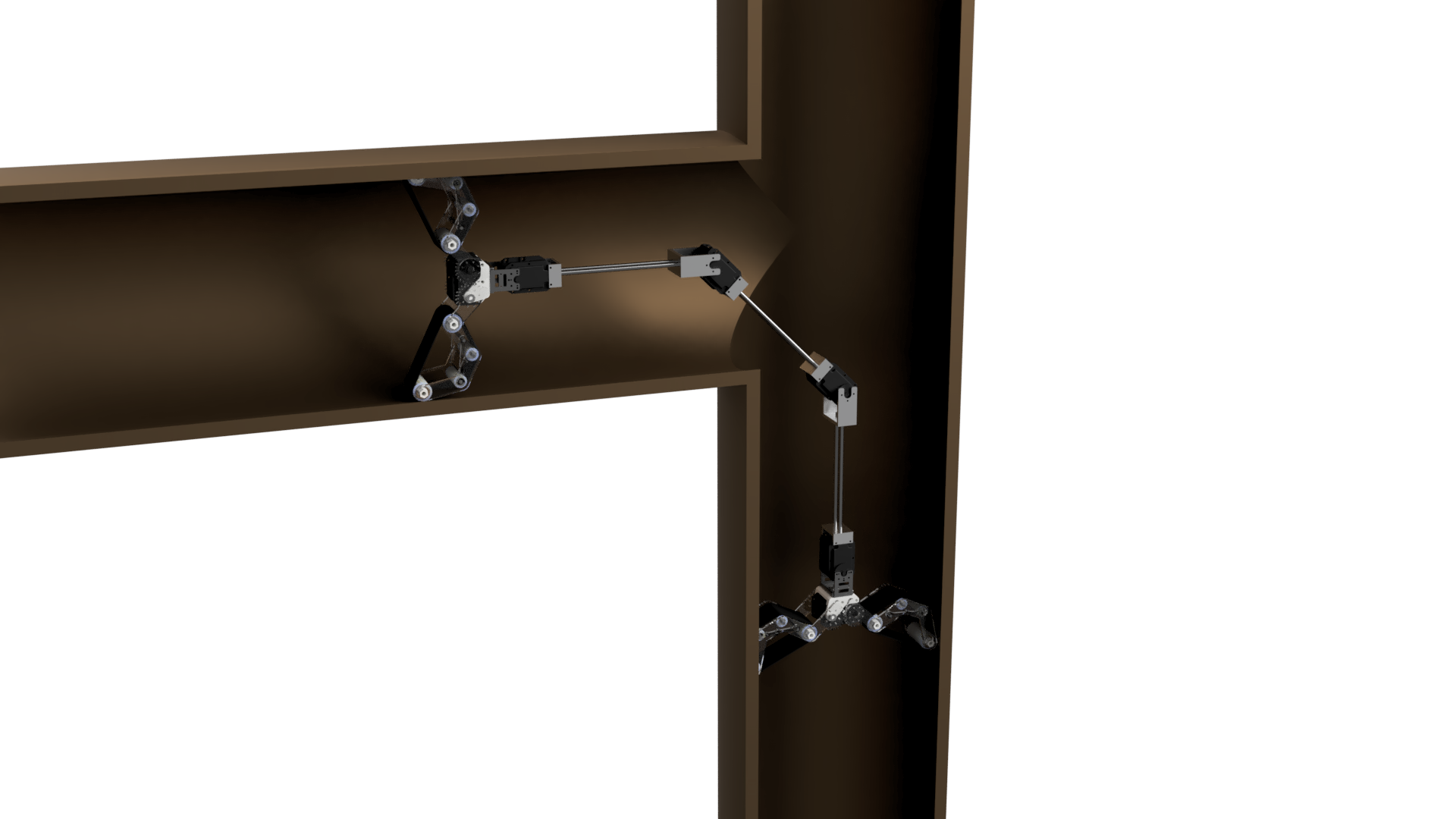
Majority of my involvement has been with design and fabrication of the robot. This project has been the beginning of my research phase. As it is seen in the render above, it consists of 2 grippers which are connected using 3 links which makes it a redundant manipulator system. The robot can be seen as a mobile manipulator, which can move or manipulate based on it’s configuration. Below renders depict various configurations.

This project also earned a conference paper at ICRA 2018 and a design patent.